Join GitHub today
GitHub is home to over 40 million developers working together to host and review code, manage projects, and build software together.
Sign up[REVIEW]: 3D reconstruction toolbox for behavior tracked with multiple cameras #1849
Comments
This comment has been minimized.
This comment has been minimized.
|
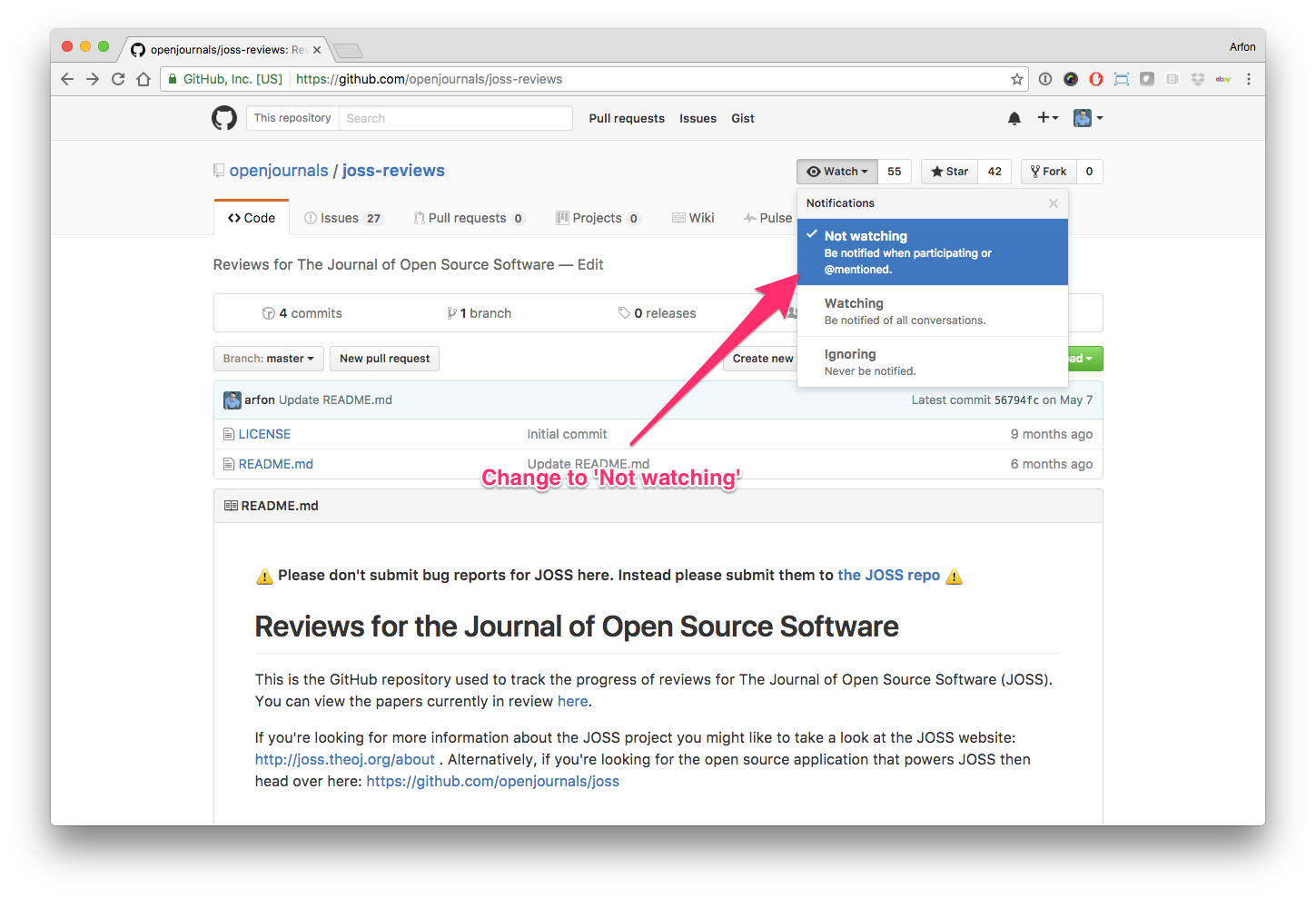
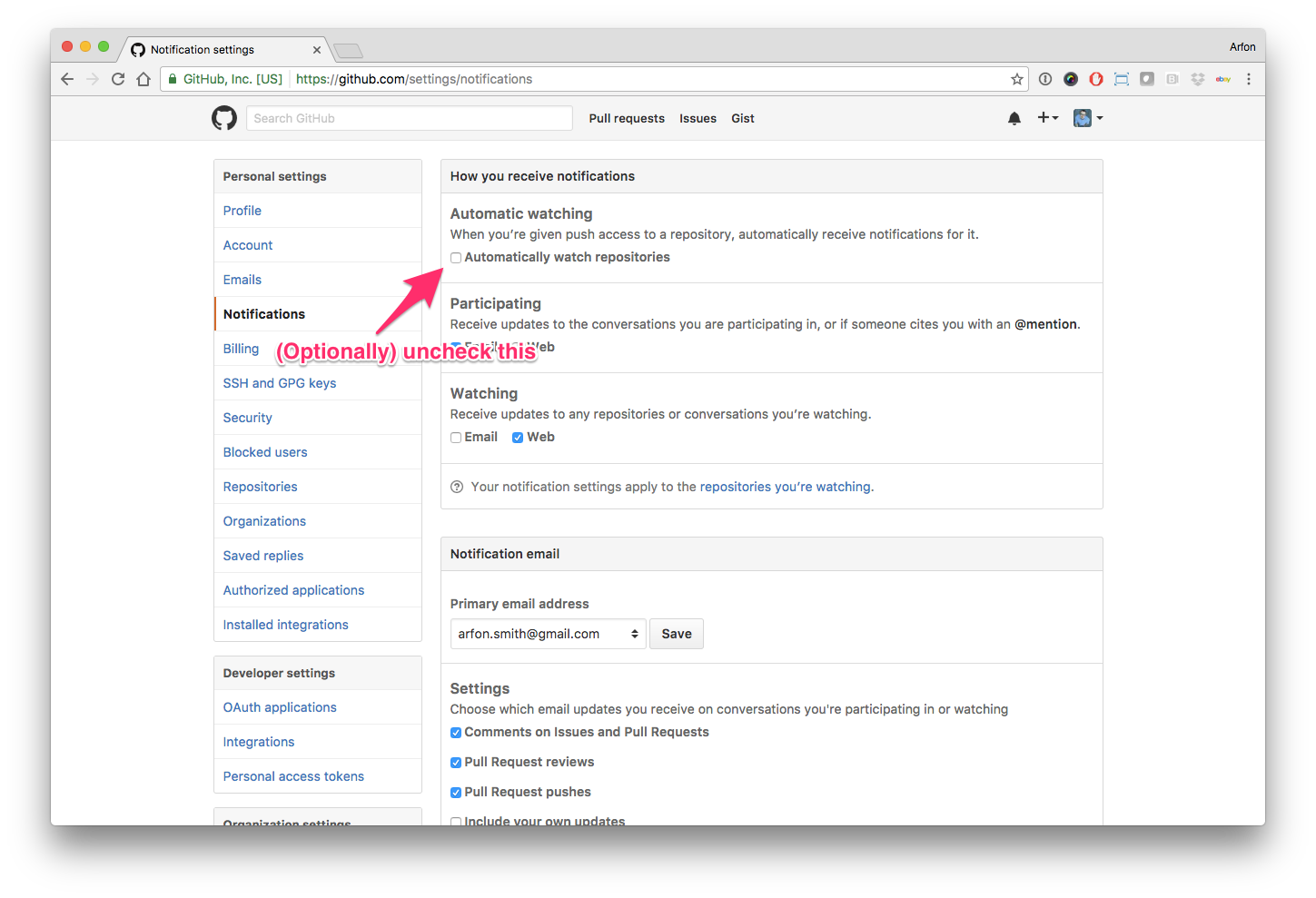
Hello human, I'm @whedon, a robot that can help you with some common editorial tasks. @danasolav, @sreschechtko it looks like you're currently assigned to review this paper If you haven't already, you should seriously consider unsubscribing from GitHub notifications for this (https://github.com/openjournals/joss-reviews) repository. As a reviewer, you're probably currently watching this repository which means for GitHub's default behaviour you will receive notifications (emails) for all reviews To fix this do the following two things:
For a list of things I can do to help you, just type: For example, to regenerate the paper pdf after making changes in the paper's md or bib files, type: |
This comment has been minimized.
This comment has been minimized.
|
This comment has been minimized.
This comment has been minimized.
This comment has been minimized.
This comment has been minimized.
|
@danasolav, @sreschechtko thank you for taking time to review our submission. |
This comment has been minimized.
This comment has been minimized.
|
@whedon set v1.1.0 as version |
This comment has been minimized.
This comment has been minimized.
|
OK. v1.1.0 is the version. |
This comment has been minimized.
This comment has been minimized.
|
I was able to install the package and run the demo as well as my own data. I have raised some issues (#1-6) which I ran into during this process and which I would like to see addressed before recommending the publication of this package in JOSS. |
This comment has been minimized.
This comment has been minimized.
|
@sreschechtko, thank you for the update! |
This comment has been minimized.
This comment has been minimized.
|
Thank you very much @sreschechtko for your time as well as for giving us detailed and very constructive review comments. We are very happy to hear that the code ran for you for the demo as well as for your own data. We will work on the issues you have raised at the repository and write back to you here. |
This comment has been minimized.
This comment has been minimized.
|
I have installed and ran the demo successfully. I would like to run my own data which was not acquired using DLC. Therefore I have raised an issue (#7) regarding the instructions for creating the csv file which is used as input. |
This comment has been minimized.
This comment has been minimized.
|
@sreschechtko, please see our responses on the issues you raised at pose3d (#1-6). We have addressed the issues and have updated the repository to reflect the changes. Please use the latest release of pose3d v2.0.0 to see the changes done to pose3d as per your comments. We found your feedback and detailed comments very helpful for us in refining our repository for public use and we thank you very much again for your time and effort and look forward to hearing from you! |
This comment has been minimized.
This comment has been minimized.
|
@danasolav, we developed pose3d using our 2D tracked data from DLC and we are very happy to hear that you have 2D tracked data outside of DLC framework as this will help us get your perspective on our code for this particular use-case. In our latest release of pose3d (v2.0.0), we have updated the readme file (addressing issue #7) to include details on preparing the .csv files required for pose3d when using a different software for 2D tracking. Looking forward to hearing more about your experience with pose3d! |
This comment has been minimized.
This comment has been minimized.
|
Thank you for responding to my review issues. I have closed the majority of issues because I think they are satisfactorily addressed, although I had a few minor comments on 5 and 7. The only issue I raised which I am leaving open is 3 for plotting 2D data with the 3D reconstruction. I think pose3d should have the option to plot the 2d points (which it already has access to) on an un-annotated video since annotated video is not necessarily commonly saved output. I would also like to a see more descriptive error message in the plotter if the video is not available but the option to plot it has been selected. |
This comment has been minimized.
This comment has been minimized.
|
Thank you for closing the issues @sreschechtko |
This comment has been minimized.
This comment has been minimized.
|
Hi All, I have closed all of the issues I opened on the main repository and am happy to recommend the package/article for publication in JOSS. |
This comment has been minimized.
This comment has been minimized.
|
Thank you for closing all the issues @danasolav and @sreschechtko. Your feedback was immensely valuable towards making pose3d better for public use and we are very grateful to both of you for your time and effort! @cMadan, we are very thankful to you and the JOSS team for taking time to edit our submission. We request you to use the latest release of pose3d - version v2.2.1, archived with following DOI at Zenodo 10.5281/zenodo.3589990 , for further processing at JOSS and look forward to hearing from you about the next steps to take for our submission! |
This comment has been minimized.
This comment has been minimized.
|
Thank you for the thorough reviews, @danasolav and @sreschechtko! |
This comment has been minimized.
This comment has been minimized.
|
@whedon set v2.2.1 as version |
This comment has been minimized.
This comment has been minimized.
|
OK. v2.2.1 is the version. |
This comment has been minimized.
This comment has been minimized.
|
@whedon set 10.5281/zenodo.3589990 as archive |
This comment has been minimized.
This comment has been minimized.
|
OK. 10.5281/zenodo.3589990 is the archive. |
This comment has been minimized.
This comment has been minimized.
|
@SwathiSheshadri, please revise the archive name in Zenodo to match the name of your submission. |
This comment has been minimized.
This comment has been minimized.
|
@whedon check references |
This comment has been minimized.
This comment has been minimized.
|
This comment has been minimized.
This comment has been minimized.
|
This comment has been minimized.
This comment has been minimized.
|
@SwathiSheshadri, I'm not sure why that isn't working, but will look into it. @openjournals/joss-eics, it looks like the archive link in the compiled PDF isn't working. Any ideas why (or how we might otherwise resolve this)? |
This comment has been minimized.
This comment has been minimized.
Those links should be fixed in the final accepted version. Some automatically generated links are not active in these proofs (all author generated links should work though). |
This comment has been minimized.
This comment has been minimized.
|
@cMadan and @Kevin-Mattheus-Moerman, thank you for your quick responses! I have checked that the other links in the document are working fine. |
This comment has been minimized.
This comment has been minimized.
Yeah, sorry about this. That's undocumented behaviour and very confusing... |
This comment has been minimized.
This comment has been minimized.
|
@whedon accept |
This comment has been minimized.
This comment has been minimized.
|
This comment has been minimized.
This comment has been minimized.
|
@cMadan - as an editor you are able to ask Whedon to make final proofs of the PDF with |
This comment has been minimized.
This comment has been minimized.
|
This comment has been minimized.
This comment has been minimized.
|
Check final proof If the paper PDF and Crossref deposit XML look good in openjournals/joss-papers#1202, then you can now move forward with accepting the submission by compiling again with the flag |
This comment has been minimized.
This comment has been minimized.
|
@SwathiSheshadri - please fix the cases (upper vs lower) in the bib entries - use {}s to protect cases where needed. |
This comment has been minimized.
This comment has been minimized.
|
@cMadan - Other than the case issue in the bib, is this otherwise ready to accept? |
This comment has been minimized.
This comment has been minimized.
|
@whedon generate pdf |
This comment has been minimized.
This comment has been minimized.
|
This comment has been minimized.
This comment has been minimized.
This comment has been minimized.
This comment has been minimized.
|
@danielskatz, thank you for your response and input on the case issue in the .bib file. It is now updated. |
This comment has been minimized.
This comment has been minimized.
|
@whedon accept |
This comment has been minimized.
This comment has been minimized.
|
This comment has been minimized.
This comment has been minimized.
|
This comment has been minimized.
This comment has been minimized.
|
Check final proof If the paper PDF and Crossref deposit XML look good in openjournals/joss-papers#1207, then you can now move forward with accepting the submission by compiling again with the flag |
This comment has been minimized.
This comment has been minimized.
|
|
This comment has been minimized.
This comment has been minimized.
|
@whedon accept deposit=true |
This comment has been minimized.
This comment has been minimized.
|
This comment has been minimized.
This comment has been minimized.
|
|
This comment has been minimized.
This comment has been minimized.
|
Here's what you must now do:
Any issues? notify your editorial technical team... |
This comment has been minimized.
This comment has been minimized.
|
Thanks to @danasolav and @sreschechtko for reviewing! |
This comment has been minimized.
This comment has been minimized.
|
|
This comment has been minimized.
This comment has been minimized.
|
Fixed. |
This comment has been minimized.
This comment has been minimized.
|
If you would like to include a link to your paper from your README use the following code snippets: This is how it will look in your documentation: We need your help! Journal of Open Source Software is a community-run journal and relies upon volunteer effort. If you'd like to support us please consider doing either one (or both) of the the following:
|

Submitting author: @SwathiSheshadri (Swathi Sheshadri)
Repository: https://github.com/SwathiSheshadri/pose3d
Version: v2.2.1
Editor: @cMadan
Reviewer: @danasolav, @sreschechtko
Archive: 10.5281/zenodo.3589990
Status
Status badge code:
Reviewers and authors:
Please avoid lengthy details of difficulties in the review thread. Instead, please create a new issue in the target repository and link to those issues (especially acceptance-blockers) by leaving comments in the review thread below. (For completists: if the target issue tracker is also on GitHub, linking the review thread in the issue or vice versa will create corresponding breadcrumb trails in the link target.)
Reviewer instructions & questions
@danasolav & @sreschechtko, please carry out your review in this issue by updating the checklist below. If you cannot edit the checklist please:
The reviewer guidelines are available here: https://joss.readthedocs.io/en/latest/reviewer_guidelines.html. Any questions/concerns please let @cMadan know.
Review checklist for @danasolav
Conflict of interest
Code of Conduct
General checks
Functionality
Documentation
Software paper
Review checklist for @sreschechtko
Conflict of interest
Code of Conduct
General checks
Functionality
Documentation
Software paper